YouTube (研究成果に関する動画はこちらをご覧ください。)
窮理図解 (研究室の方針や雰囲気についてはこちらの記事をご覧ください。)

慶應理工TV (研究室の概要についてはこちらの動画をご覧ください。 )

各研究テーマの詳細
電気駆動式”空飛ぶクルマ”の開発
Development of Electric Flying Car
静音かつ高速で、プロペラのない“空飛ぶクルマ”の実現を目指し、イオン風やプラズマジェットなど、高電圧を活用した新たな推進原理の確立や実験機の構築に取り組んでいます。
With the aim of realizing a silent, high-speed, propeller-less “flying car,” we are working to establish a new propulsion principle using high-voltage phenomena such as ionic winds and plasma jets, and to build an experimental aircraft.
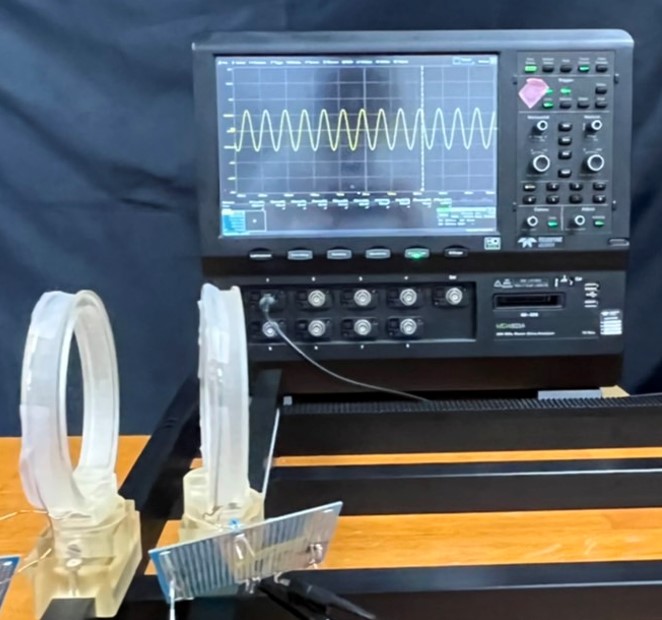
非接触給電
Wireless Power Supply
送受電コイルの電気的な共振を利用した磁界共鳴方式を用いた非接触給電の研究に取り組んでいます。ケーブルをつなぐことなく、電力を供給できることから、電気機器の利便性向上が期待されます。
We are working on the research of wireless power supply using the magnetic resonance method, which utilizes the electrical resonance of the sending and receiving coils. This system is expected to improve the convenience of electrical devices because it can supply power without connecting cables.
接触力制御
Contact Force Control
ロボットが人と同じ空間で動作する場合、人と接触し、傷つける可能性があります。そこで、センサの情報をもとに接触する力を制御し、人を傷つけないような柔軟な制御を実現するための研究を行っています。
When a robot operates in the same space as a person, there is a possibility that it will come into contact with the person and hurt them. Therefore, we are conducting research to control the contact force based on the information from the sensor, and to realize flexible control that does not hurt people.
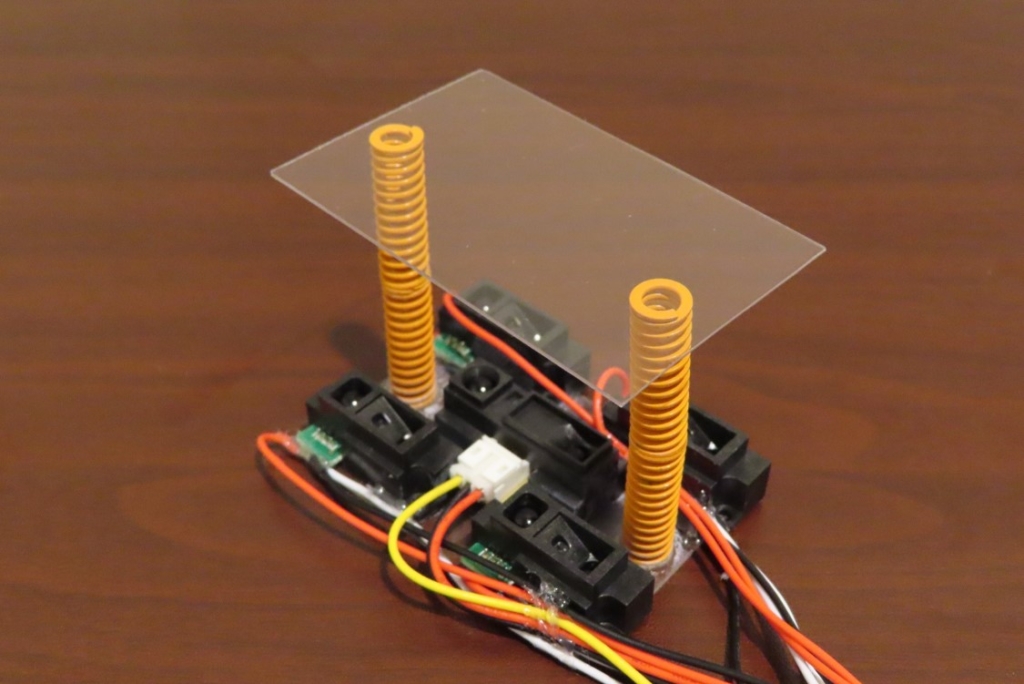
多機能センサの開発
Development of Multifunctional Sensors
ロボットを用いて、多様な物体をマニピュレーションするためには、対象物との距離や対象物の傾き、加えている力を知ることが重要です。本研究ではマサチューセッツ工科大学と共同で、これらの情報を取得可能な多機能センサの開発を行っています。
In order to manipulate various objects with a robot, it is important to know the distance to the object, the tilt of the object, and the force being applied. In this research, in collaboration with the Massachusetts Institute of Technology, we are developing a multifunctional sensor that can acquire the above information.
センサレスモータ制御
Sensorless Motor Control
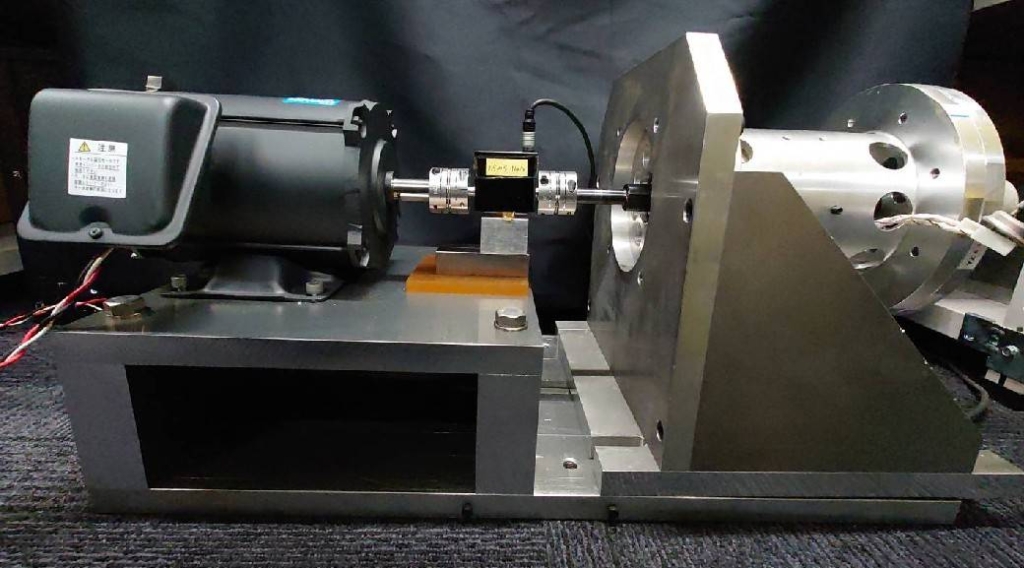
モータの制御には角度の情報が不可欠です。しかし、角度を測定するためのセンサは装置サイズやコストの増大を招きます。そこで、角度センサを用いず、電流値やモータの数理モデル等に基づき角度を推定しモータを駆動する手法を研究しています。
Angle information is essential for motor control. However, sensors for angle measurement increase the size and cost of the device. Therefore, we are researching a method to estimate the angle and drive the motor based on the current response and mathematical model of the motor, without using an angle sensor.
医療用ロボット
Medical Robot
外科手術においては、狭隘空間において繊細な動作を行うため、極めて高度な技能が要求されます。本研究では医学部や医療機器メーカと共同で、遠隔操作型外科支援ロボットの開発を行っています。
Surgical operations require a high level of skill to perform delicate movements in a confined space. In this research, we are developing a teleoperated surgical robot in collaboration with medical department and medical equipment companies.
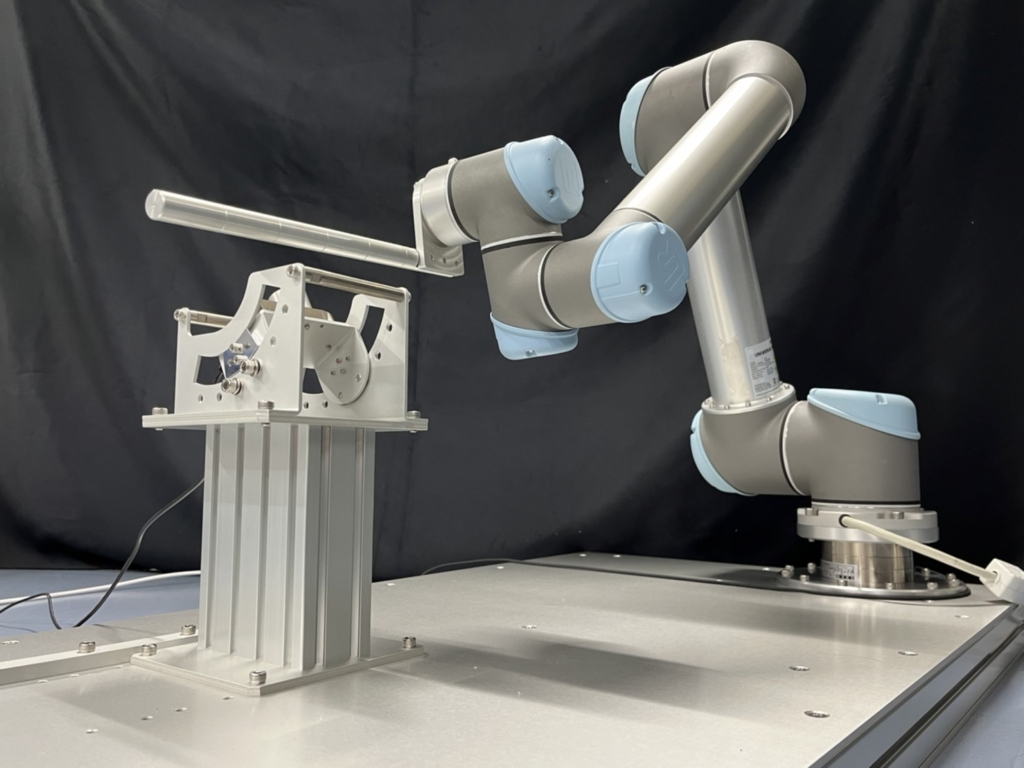
歯科ドリルの制御
Control of Dental Implant Drill
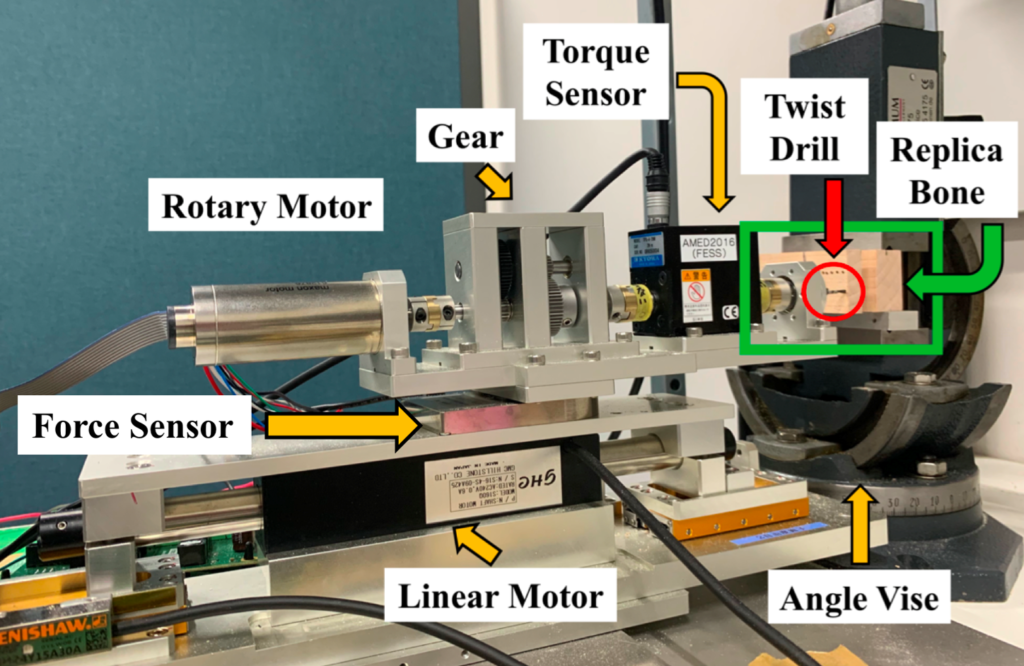
歯科インプラント手術において、ドリルで骨を切削し、貫通させる必要があります。抵抗力や切削トルク(回転を妨げるトルク)といった情報をもとに、骨の貫通検知や貫通時のドリルの自動停止に関する研究を行っています。
In dental implant surgery, cutting and penetration of alveolar bone with a dental implant drill are needed. Based on the information about resistance force and cutting torque, we are working on the research about the detection of the penetration and automatic stop of the drill in the penetration.
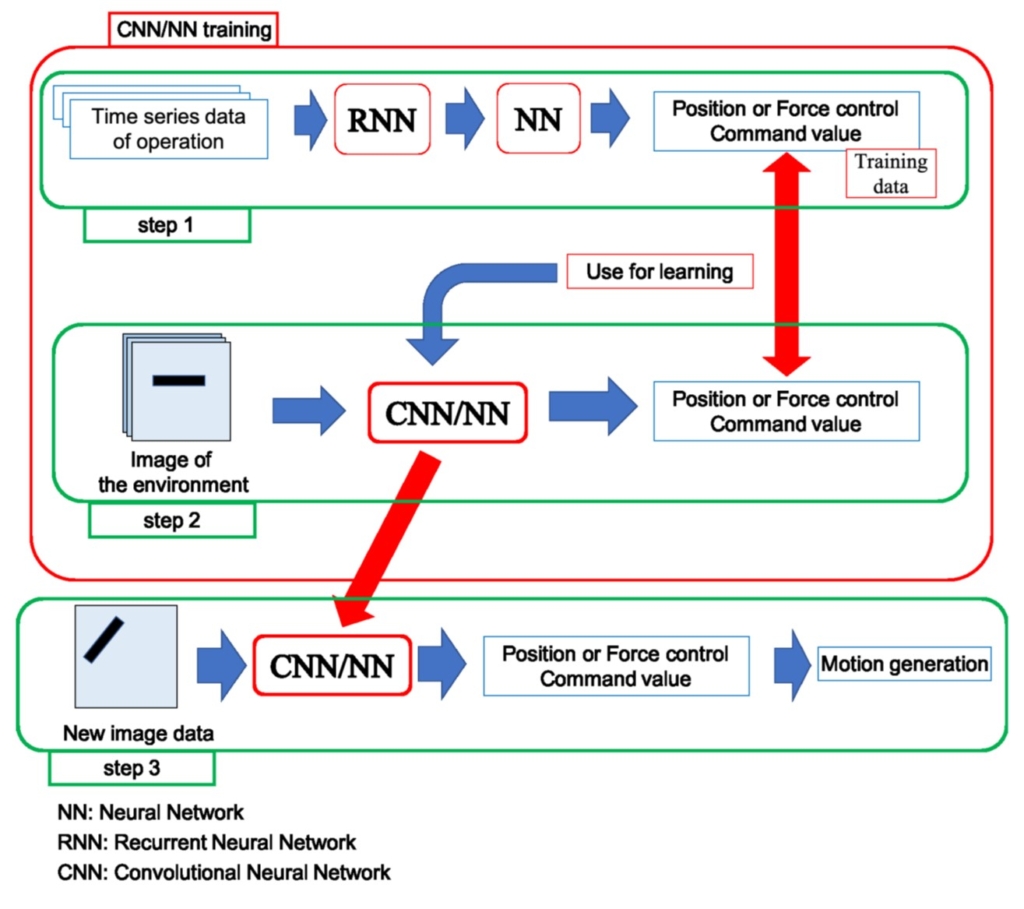
人工知能による動作生成
Motion Generation by Artificial Intelligence
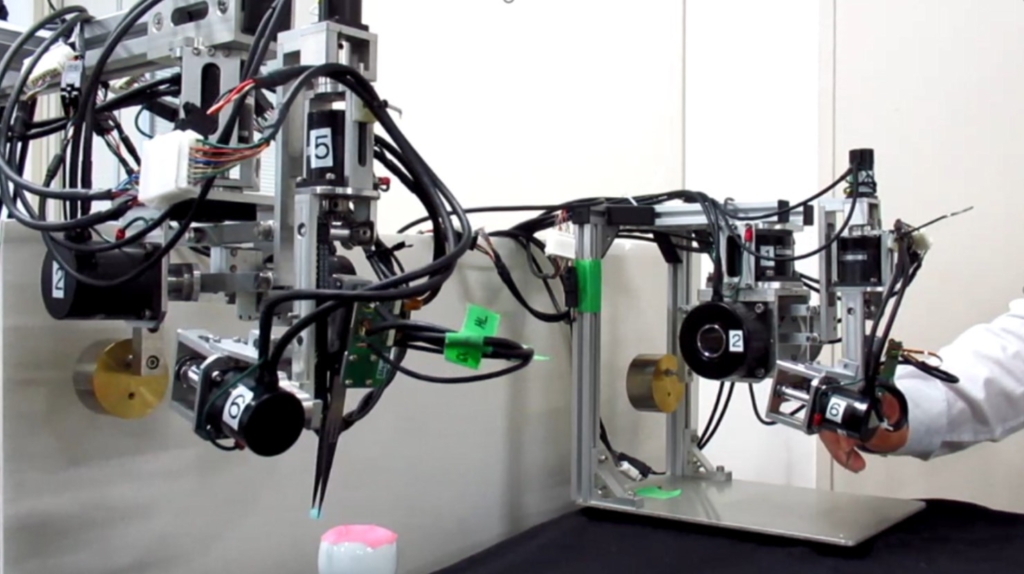
ロボットは環境の変化に合わせて動作を行うのは困難です。そこで人間の動作を参考に人工知能を用いて動作生成を行うことで、ロボットに環境の変化に応じた動作を行わせ、タスクを成功させる研究を行なっています。
It is difficult for robots to adapt their behavior to changes in the environment. Therefore, we are researching how to make robots behave in response to changes in the environment and succeed in tasks by using artificial intelligence to generate motions based on human motions.